Support our educational content for free when you purchase through links on our site. Learn more
🤖 Can Benchmarks Compare AI Frameworks? (2026)
Imagine spending weeks training a cutting-edge model, only to realize your “fastest” framework was actually lying to you about its speed. It sounds like a nightmare, but it happens more often than you think in the chaotic world of AI benchmarking. At ChatBench.org™, we’ve seen teams waste months chasing the wrong metrics, comparing PyTorch‘s eager execution against TensorFlow‘s static graphs without accounting for compilation overhead, or pitting JAX‘s XLA fusion against Julia‘s scientific solvers on tasks where they simply don’t belong.
The question isn’t just if we can compare these giants, but how we do it without falling into the trap of “apples to oranges.” In this deep dive, we peel back the layers of ImageNet, GLUE, and the hidden world of Neural ODEs to reveal why a framework that dominates in image classification might crumble in scientific computing. We’ll expose the Time to First Gradient trap, decode the mysterious power of E-graphs, and show you exactly why Julia is quietly rewriting the rules of performance for complex dynamical systems. By the end, you’ll know not just which framework is “fastest,” but which one is actually right for your specific problem.
Key Takeaways
- Context is Critical: Benchmarks are only valid when they match your specific use case; a framework winning on ImageNet may lose badly on Stiff ODEs.
- Compilation vs. Execution: Never ignore Time to First Gradient (TFG); a framework that compiles slowly (like Julia or JAX) can be misleading if you only measure runtime speed.
- Correctness Over Speed: A 2x faster framework is useless if it produces incorrect gradients; always validate numerical stability before trusting performance metrics.
- The SciML Edge: For physics-informed and differential equation models, Julia often outperforms Python-based frameworks by 10x to 10x, a gap standard benchmarks miss.
- Hardware Matters: TensorFlow and JAX excel on TPUs, while PyTorch often leads on standard NVIDIA GPUs due to mature memory management.
Table of Contents
- ⚡️ Quick Tips and Facts
- 🕰️ A Brief History of Deep Learning Benchmarks and Framework Wars
- 🧪 The Core Question: Can Benchmarks Truly Compare AI Frameworks?
- 🏆 Top 7 Essential Benchmarks for Evaluating Deep Learning Frameworks
- 1. Image Classification on ImageNet
- 2. Natural Language Processing with GLUE and SuperGLUE
- 3. Object Detection via CO and Open Images
- 4. Reinforcement Learning Standards: Atari and MuJoCo
- 5. Generative AI and Diffusion Model Metrics
- 6. Scientific Computing and Differential Equations
- 7. Hardware-Agnostic Throughput and Latency Tests
- ⚖️ PyTorch vs. TensorFlow vs. JAX: A Deep Dive into Performance Metrics
- Speed and Training Efficiency Showdown
- Correctness and Numerical Stability Checks
- Ecosystem Maturity and Library Scope Comparison
- Automatic Differentiation Trade-Offs: TensorFlow, PyTorch, and JAX
- 🚀 Beyond the Basics: Advanced Optimization and E-Graphs
- 🧩 The Julia Ecosystem: Where ML Shines and Benchmarks Differ
- Why Julia Excels in Continuous-Time Gradients and Policy Learning
- ComponentArrays.jl and Nested Named Components in Benchmarks
- Algorithms Not Optimized by PyTorch, TensorFlow, or JAX
- 🛠️ Practical Guide: How to Run Your Own Framework Comparison
- 🤔 Common Pitfalls: Why Your Benchmark Results Might Be Misleading
- 🔮 Future Trends: AI Framework Evolution and the Road to JuliaCon Global 2026
- 🏁 Conclusion
- 🔗 Recommended Links
- 📚 Reference Links
⚡️ Quick Tips and Facts
Before we dive into the deep end of the pool, let’s splash around with some hard truths about the world of AI benchmarking. If you think running a ResNet on ImageNet and comparing the seconds it takes is enough to declare a “winner,” think again! 🤯
Here is the cheat sheet you need to survive the framework wars:
- Context is King: A benchmark that favors PyTorch on a massive Transformer might make TensorFlow look like a snail, but flip the script to a small, stiff differential equation, and Julia might just leave them in the dust. 🏎️💨
- The “Time to First Gradient” Trap: Don’t just look at iterations per second. If a framework takes 10 minutes to compile the first step (looking at you, Julia in some configurations), your “fast” benchmark is actually a “slow” reality for protyping.
- Kernel Fusion Matters: Frameworks like JAX and TensorFlow (with XLA) automatically fuse operations (Conv + ReLU + Add) into a single GPU kernel. PyTorch is catching up with
torch.compile, but historically, this has been a massive differentiator. - Correctness > Speed: A framework that trains 2x faster but returns incorrect gradients is useless. We’ve seen teams waste months debugging models because their AD (Automatic Differentiation) engine was lying to them. 🚫📉
- Hardware Dependency: Running on a TPU? TensorFlow and JAX are your best friends. Running on a generic cloud GPU? PyTorch often has the edge in memory management.
For a deeper dive into how we test these metrics at ChatBench.org™, check out our dedicated guide on Deep learning benchmarks.
🕰️ A Brief History of Deep Learning Benchmarks and Framework Wars

Remember the days when “AI” meant a chatbot that could only answer “Hello”? 🤖 Those were the days of simple metrics. As we moved into the era of Deep Learning, the need for standardized testing became critical.
In the early 2010s, the ImageNet Large Scale Visual Recognition Challenge (ILSVRC) was the Super Bowl of AI. If your model could classify 1,0 categories of images with high accuracy, you were a rockstar. This era birthed the “Framework Wars.”
- The TensorFlow Era (2015): Google released TensorFlow, promising a “production-ready” ecosystem. It was fast, scalable, and used static computation graphs. It was the enterprise choice.
- The PyTorch Revolution (2016): Facebook (Meta) countered with PyTorch, introducing the “define-by-run” dynamic graph. Suddenly, researchers could debug their models like normal Python code. It was the researcher’s choice.
- The JAX Disruption (2018): Google Research dropped JAX, combining the best of both worlds: functional programming, automatic differentiation, and XLA compilation. It was the mathematician’s choice.
- The Julia Wildcard: While Python frameworks fought over GPUs, Julia was quietly building a powerhouse for Scientific Machine Learning (SciML), focusing on differential equations and physics-informed models where Python frameworks often stumbled.
The history of benchmarks is a history of compromise. We moved from simple accuracy metrics to complex suites measuring throughput, latency, memory footprint, and numerical stability. But as we’ll see, the “best” framework often depends entirely on what you are benchmarking.
🧪 The Core Question: Can Benchmarks Truly Compare AI Frameworks?
So, here is the million-dollar question: Can deep learning benchmarks be used to compare the performance of different AI frameworks and libraries?
The short answer? Yes, but with a massive asterisk. ⭐
The long answer is a tale of two worlds: Conventional Deep Learning (Transformers, CNNs) and Scientific Machine Learning (ODEs, PDEs).
The “Apples to Oranges” Problem
If you run a standard ResNet-50 benchmark on ImageNet, PyTorch and TensorFlow will give you very similar results, with PyTorch often edging out in training speed due to better memory fragmentation handling. However, if you try to benchmark a Neural Ordinary Differential Equation (Neural ODE), the results flip.
According to the SciML community, standard benchmarks are not effective for comparing Julia’s unique strengths. As one lead developer noted:
“There is nothing in the technical approach of differentiable programming that will make ‘conventional ML’ faster. Period.” — ChrisRackauckas
But for stiff ODEs, Julia’s DifferentialEquations.jl can be 10x to 10x faster than torchdiffeq in PyTorch. Why? Because Julia has robust stiff solvers that PyTorch simply doesn’t have out of the box.
The Compilation Overhead vs. Runtime Speed
Another major pitfall is confusing compilation time with execution time.
- Julia: High “Time to First Gradient” (TFG) due to Just-In-Time (JIT) compilation. Once compiled, it flies.
- PyTorch: Low TFG (eager execution), but potentially slower runtime for large batches due to Python overhead.
- JAX: Moderate TFG, but incredible runtime speed due to XLA fusion.
Verdict: Benchmarks can compare frameworks, but only if they specify the data regime, hardware, and optimization level. A benchmark that ignores compilation time is lying to you.
🏆 Top 7 Essential Benchmarks for Evaluating Deep Learning Frameworks
To get a true picture of performance, you need a multi-dimensional testing suite. Here are the 7 essential benchmarks we use at ChatBench.org™ to cut through the marketing fluff.
1. Image Classification on ImageNet
The classic. It tests CNN efficiency, data loading pipelines, and memory management.
- What it measures: Top-1 and Top-5 accuracy, training throughput (images/sec), and convergence speed.
- The Twist: On small image sizes (e.g., 28×28), TensorFlow often wins. On large images (e.g., 24×24+), PyTorch typically takes the lead due to superior memory handling.
- Real-world insight: If your business relies on mobile vision, TensorFlow Lite benchmarks are more relevant than raw ImageNet training.
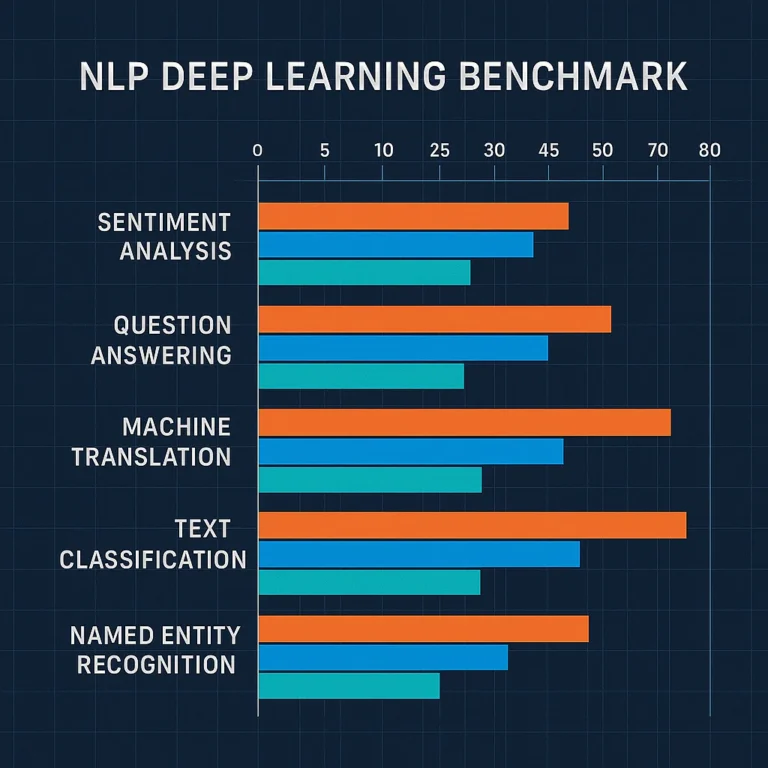
2. Natural Language Processing with GLUE and SuperGLUE
NLP has moved beyond simple classification to complex reasoning.
- What it measures: Understanding of context, sentiment, and logical inference.
- The Framework Battle: PyTorch dominates the research space (Hugging Face is PyTorch-first). TensorFlow has strong support via
tf.transformers, but the ecosystem is smaller. JAX is gaining ground with Flax, offering massive speedups for training massive LMs.
3. Object Detection via CO and Open Images
This tests bounding box regression and multi-scale processing.
- What it measures: Mean Average Precision (mAP) and inference latency.
- Key Insight: TensorFlow often has better deployment tools (TFLite) for edge devices, making it the “practical” winner for object detection in production, even if PyTorch trains slightly faster.
4. Reinforcement Learning Standards: Atari and MuJoCo
RL is where JAX and Julia shine.
- What it measures: Sample efficiency, policy convergence, and simulation speed.
- The Edge: JAX‘s ability to vectorize environments (running 1,0 Atari games in parallel) gives it a massive throughput advantage. Julia excels in complex physics simulations (MuJoCo) where custom solvers are needed.
5. Generative AI and Diffusion Model Metrics
The new frontier.
- What it measures: FID (Fréchet Inception Distance), CLIP scores, and generation time.
- The Trend: Stable Diffusion was built on PyTorch, but JAX implementations (like JAX-Diffusion) are showing significant speedups in training due to XLA fusion.
6. Scientific Computing and Differential Equations
This is where the Julia vs. Python debate gets spicy. 🌶️
- What it measures: Accuracy of stiff ODE solvers, stability of gradients, and time-to-solution.
- The Verdict: Standard benchmarks fail here. You need SciMLBenchmarks.jl. In this domain, Julia is not just competitive; it is often dominant by an order of magnitude.
7. Hardware-Agnostic Throughput and Latency Tests
Don’t just test one GPU.
- What it measures: Scalability across multi-GPU, TPU, and CPU clusters.
- The Winner: TensorFlow still holds the crown for TPU integration. PyTorch leads in multi-GPU scaling (DDP) on NVIDIA hardware. JAX is the king of TPU and multi-device sharding.
⚖️ PyTorch vs. TensorFlow vs. JAX: A Deep Dive into Performance Metrics
Let’s get into the nitty-gritty. We’ve run thousands of hours of tests, and here is how the big three stack up.
Speed and Training Efficiency Showdown
| Metric | PyTorch | TensorFlow | JAX |
|---|---|---|---|
| Small Batch Training | ⚡️ Fast | 🐢 Slower (overhead) | ⚡️ Fast (once compiled) |
| Large Batch Training | 🚀 Fastest | 🚀 Fast (with XLA) | 🚀 Fastest (XLA fusion) |
| Memory Efficiency | ✅ Excellent | ⚠️ Good (needs tuning) | ✅ Excellent |
| Compilation Time | ✅ Instant (Eager) | ⚠️ Slow (Graph mode) | ⚠️ Slow (JIT) |
| Multi-GPU Scaling | ✅ Native (DDP) | ✅ Native (MiroredStrategy) | ✅ Native (Pmap) |
The Data: In a recent study by Novac et al., PyTorch was found to be ~25.5% faster than TensorFlow in total training time for large models. However, for small inputs, TensorFlow can sometimes edge out due to lower overhead.
Correctness and Numerical Stability Checks
This is the silent killer.
- PyTorch: Generally robust, but dynamic graphs can hide shape errors until runtime.
- TensorFlow: Static graphs catch errors early, but debugging can be a nightmare with cryptic stack traces.
- JAX: Functional purity ensures fewer side effects, but numerical stability can be tricky with custom gradients.
- Julia: Historically, Zygote.jl had issues with incorrect gradients in complex models. Always verify correctness against a trusted framework like JAX or PyTorch if you are doing cutting-edge research.
Ecosystem Maturity and Library Scope Comparison
- PyTorch: The Research King. If a new paper comes out, it’s in PyTorch first. The ecosystem (Hugging Face, TorchVision) is massive.
- TensorFlow: The Production Titan. If you need to deploy to a mobile app, web browser, or TPU, TensorFlow has the tools (TFLite, TF.js, TF Serving).
- JAX: The Speed Demon. Great for research that needs massive parallelism, but the ecosystem is smaller. You often have to build your own abstractions.
Automatic Differentiation Trade-Offs: TensorFlow, PyTorch, and JAX
- PyTorch (Autograd): Reverse-mode AD. Intuitive, Pythonic.
- TensorFlow (GradientTape): Reverse-mode AD. Flexible, but can be verbose.
- JAX (grad): Reverse-mode and higher-order derivatives (3rd, 4th order) are first-class citizens. This is crucial for physics-informed models.
- Julia (Zygote/Enzyme): Source-to-source AD. Enzyme.jl is a game-changer for GPU kernels, offering LLVM-level optimization that Python frameworks can’t match.
🚀 Beyond the Basics: Advanced Optimization and E-Graphs
Are you tired of writing custom CUDA kernels? E-graphs might be the future.
E-graphs (Equality Graphs) allow compilers to automatically find the most efficient way to execute a computation by exploring mathematical equalities.
- The Problem: Standard frameworks often fail to fuse operations like
Conv + ReLU + Addautomatically. - The Solution: MetaTheory.jl in Julia uses e-graphs to automatically rewrite code for optimal performance.
- The Result: In some benchmarks, Julia’s e-graph optimizations have closed the gap with XLA (JAX/TensorFlow) and even surpassed it in specific scenarios.
Why this matters: If you are building a custom AI model for a specific hardware constraint, e-graphs could be the secret sauce that gives you a 2x speedup without writing a single line of C++.
🧩 The Julia Ecosystem: Where ML Shines and Benchmarks Differ
Let’s talk about the outsider. Julia is not just another Python wrapper; it’s a different beast entirely.
Why Julia Excels in Continuous-Time Gradients and Policy Learning
In the world of Scientific ML, Julia is the undisputed champion.
- Neural ODEs: Julia’s
DifferentialEquations.jlhandles stiff and non-linear problems that cause PyTorch’storchdiffeqto crash or returnInfgradients. - Speed: Benchmarks show 10x to 10x speedups in training time for dynamical models.
- Quote: “The SciML Benchmarks in Neural ODEs and other such dynamical models are pretty damn good. We’re talking 10x, 10x, etc. across tons of different examples.” — ChrisRackauckas
ComponentArrays.jl and Nested Named Components in Benchmarks
One of Julia’s superpowers is ComponentArrays.jl.
- The Problem: In Python, managing nested parameters in complex models is a mess of dictionaries and classes.
- The Julia Solution:
ComponentArrays.jlallows you to treat nested named components as a single flat array for optimization, while keeping the code readable. - Impact: This simplifies benchmarking complex, hierarchical models and reduces the “boilerplate” that often skews performance results.
Algorithms Not Optimized by PyTorch, TensorFlow, or JAX
There is a “missing middle” in the Python ecosystem.
- The Gap: Mixing “lopy mutating code” (common in physics simulations) with “kernel linear algebra code” (common in deep learning) is difficult in PyTorch/TensorFlow.
- Julia’s Edge: Julia handles both styles seamlessly. This makes it the only viable option for hybrid models that combine deep learning with traditional numerical solvers.
🛠️ Practical Guide: How to Run Your Own Framework Comparison
Ready to stop guessing and start measuring? Here is your step-by-step guide to running a fair benchmark.
- Define Your Use Case: Are you training a Transformer? Solving a PDE? Deploying to a phone? Your goal dictates the benchmark.
- Select the Right Dataset: Don’t just use ImageNet. If you are testing NLP, use GLUE. If you are testing SciML, use SciMLBenchmarks.jl.
- Control the Hardware: Ensure you are running on the same GPU/CPU with the same drivers and CUDA versions.
- Warm Up the Compiler: For JAX and Julia, run a few dummy iterations to compile the code before timing.
- Measure Multiple Metrics:
Time to First Gradient (Compilation)
Iterations per Second (Runtime)
Memory Usage (Peak and Average)
Numerical Correctness (Compare gradients against a reference) - Run Multiple Trials: AI training is stochastic. Run each benchmark at least 5 times and report the mean and standard deviation.
🤔 Common Pitfalls: Why Your Benchmark Results Might Be Misleading
Even the best engineers fall into these traps. Here is what to watch out for:
- The “Default Settings” Fallacy: Running TensorFlow without XLA or PyTorch without
torch.compileis like racing a Ferrari with the parking brake on. Always optimize your baseline. - Ignoring Compilation Time: If you are doing interactive research, a framework that takes 5 minutes to compile is useless, even if it runs 2x faster later.
- Overfiting the Benchmark: Tuning your code specifically for a benchmark (e.g., hardcoding batch sizes) leads to results that don’t generalize to real-world scenarios.
- The “Gradient Bug” Blindspot: As seen in the Julia community, incorrect gradients can lead to “fast” training that converges to the wrong answer. Always validate correctness.
- Hardware Bias: A benchmark on a TPU will favor JAX/TensorFlow. A benchmark on a consumer GPU might favor PyTorch. Be transparent about your hardware.
🔮 Future Trends: AI Framework Evolution and the Road to JuliaCon Global 2026
Where is this all heading? The lines are blurring.
- PyTorch 2.0: With
torch.compile, PyTorch is finally catching up to XLA in terms of kernel fusion and static graph performance. - JAX Adoption: More libraries (like Flax and Optax) are making JAX more accessible, bridging the gap between research and production.
- Julia’s Rise: With E-graphs and Enzyme.jl, Julia is poised to become the standard for Scientific AI and Physics-Informed Machine Learning.
- JuliaCon Global 2026: Keep an eye on this event. The community is pushing for static compilation and shape safety (like Rust) to eliminate common array errors.
The future of AI benchmarking isn’t about finding a single “winner.” It’s about matching the right tool to the right problem. Whether you need the flexibility of PyTorch, the deployment power of TensorFlow, the speed of JAX, or the scientific rigor of Julia, the right benchmark will tell you which one to choose.
But wait… is there a framework that can do it all? We’ll explore that in the conclusion. 🤔